スタックチャンを作って、何となくメカ系を作って見たくなりました。
以前から、ずっと気になっていた「リアクション・ホイールを使った何か」を作って見ようかと思います。
なお、リアクション・ホイール関連の製作記事は、下記が非常に参考になります。
最終的には、一輪車に乗ったスタックチャンが自由に動きまわり、自分だけのAIエージェント*1を載せて話をするといったとこが出来たらいいですね。
プロトタイプ構想
まずは、リアクションホイールに使用するモータやセンサーの基本性能の確認や制御則の設計のために実験用プロトタイプを作ってみます。

ホイール(Inertia)やフレーム類は3Dプリンタで作るつもりです。実験しながら作っていきます。
全体のシステムブロック図は、とりあえずこんな感じです。フォトインタラプタで、回転速度を測る予定です。トルク制御のための電流検出も欲しいところではありますが、それは追々。

使用部品
とりあえず手軽に出来そうという事で、普通のDCモータをメインにし、手持ちの部品を活用しつつ、幾つか部品を購入しました。
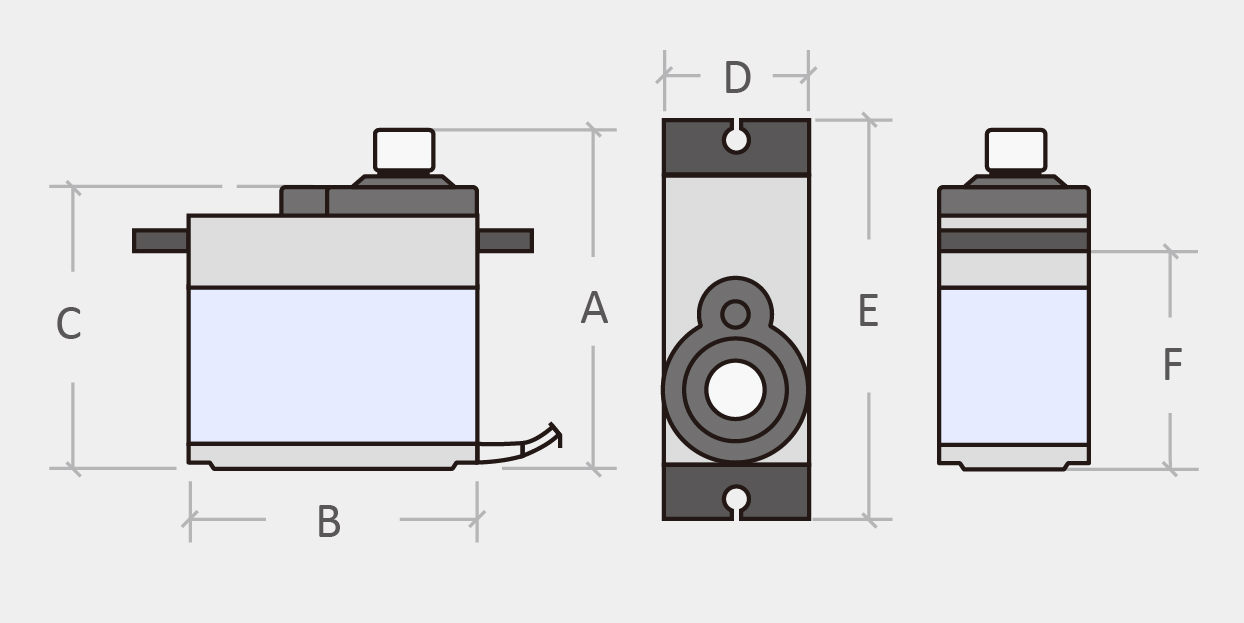
・モータ:RE-280RA(マブチモータ、3V定格)
・ドライバ:DRV8833(2ch、10V、0.8A)
・フォト・インタラプタ:EEJ-SJ5-B(OMRON、手持ち品)
・IMU:MPU9250(3軸加速度、3軸レート、3軸磁気)
・ESP32C6(XIAO)

製作
モデリング
スケッチを元に3Dモデルを作成しました。サイズ感も適当に10cm角で作ってみました。細かい所は作りながら修正していきます。モータが意外と出っ張っているので、このままだと倒れそうですが、プロトタイプなので。

イナーシャ部製作
最初に3Dプリンタでイナーシャ・ホイールを作りました。モータとの接合の仕方は、amazonでフランジを買って取り付けることにします。これが一番、高かったです。


ホイール部は、フランジをタッピングスクリューで止めて一応完成です。モータに取り付けて試運転をしてみましたが、若干軸がブレている感じです。フランジ取り付け面が綺麗に整形されていないせいかと思いますが、全体を作ってから考えます。

モータシミュレーション
一応、ホイールの慣性モーメントを計算してみました*2。3Dプリンタのフィラメント充填率は30%にしたので一様な密度ではないですか、計算質量と実測実測に合うように密度を逆算して求めました*3。

また、簡易的ですが、モータに定格電圧をかけた時の回転数をシミュレーションしてみました。初速0から一定時間毎に、モーター性能線図からトルクを計算し、イナーシャを使って角加速度を計算、逐次速度へ加算というのを、表計算ソフトで求めました。早く物理エンジンでシミュレーションできる環境を整えねば!!
なお、モータの諸元はネットのカタログ情報からです。モータの箱に印刷してある無負荷回転数などの諸元がカタログと全然違う(カタログ:9200rpm、箱:8700rpm)のが気になりますが、簡易計算なのでカタログベースで計算しました。


計算結果です。回転が安定するまで約5秒ほどかかってますが、実際に回すとおおよそ6秒程度だったので、オーダーとしては合っているようです。

今後
今回は、ここまでです。
次は筐体を製作し、フォトインタラプタによる回転数計測ができるようにして、実際の速度応答を計測してみます。
そこから、慣性モーメントなどの推定を行い制御装置設計に進みたいと思います。
先は長いですが、よろしかったらお付き合いねがいます。



 買う
買う












































 既存のコンセントにVVFケーブルを接続。かなり窮屈な感じになります。
既存のコンセントにVVFケーブルを接続。かなり窮屈な感じになります。